Aluminum in Motion
Guided by Touch
Course: Metal I
Process Driven Project
April - May 2024
This project explores the relationship between rigid materiality and organic form. It is inspired by the tactile guidance of the human hand.
With aluminum’s structural rigidity as its foundation, I assembled repetitive shapes scaled in varying sizes onto each other for an illusion of growth which transitions from small to large, and then back again through reflective symmetry.
In Motion
Final Form












From the Beginning

For my initial sketch models, I experimented with creating movement using jump ropes and metal rods. I decided to further develop the concept with jump ropes because it had a greater potential in giving open and fluid movement. I was particularly drawn to the repetitive use of the same shape, which created an overlapping effect while it’s movement was influenced by the interaction between the layers above and below it.
Process

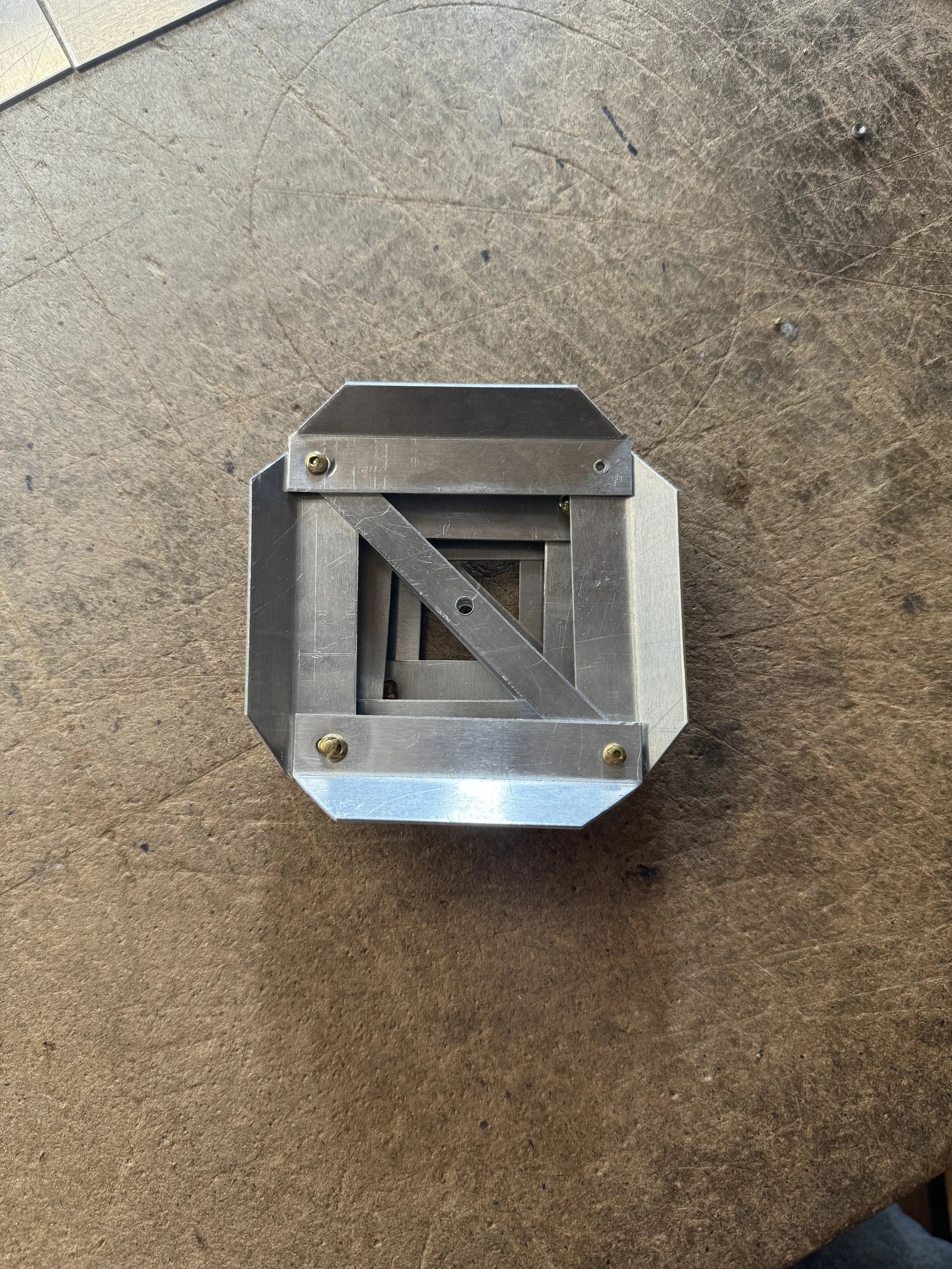
For the final design, I chose to work with the four-sided shape from one of my sketch models. I created this by riveting identical four-piece components together and bending each at the same angle. I adjusted the dimensions of each layer with a 0.5-inch difference between the pieces.



These layers were connected using a central connection piece riveted to each four-sided shape which has a single hole in the middle for jump ring connections. I additionally added two holes on opposite corners of each four-sided piece for further jump ring connections to lesson its overwhelming flexibility.